Portable system <<
Previous Next >> assignment2
four wheel car
參考書籍翻譯
Line following BubbleRob tutorial
simulation
External controller tutorial
BubbleRob tutorial
simulation dialog
試設定動力至車v-rep模型連結
car easy setting for motor and model.ttt
本資料由40723222提供
BubbleRob tutorial:在此教程中可以透過我們自行設置的BubbleRob機器人進行初步的模擬,在上學期中我們有實際的以v-rep操作過這個教程,在這個教程中有含括了很多包括如何建造模型(機器人本體、輪子、後方支撐滑塊、障礙物),並且經由設定好的距離傳感器去感知並且避開我們所設立的障礙物,其中很重要的要點是如何去設計指令使輪胎兩側的傳動器依照我們所想要的方式去做運動,且當距離感測器接近我們所設立的障礙物時,他必須要做出相對應的反應部會使其碰到障礙物,另外還必須要考慮到視覺辨識系統,使機器人在移動時我們能夠觀測到機器人前方之狀況,此教程能夠使我們更加有效率的使用v-rep這套模擬軟體。
影片教學網址: https://www.youtube.com/watch?v=CXGJmwHt81g&t=59s
本資料由40723243
Line following BubbleRob tutorial:在此模擬教程中我們銜接上面的BubbleRob教程,我們想要使其能夠按照我們所規劃的路徑移動,在四輪車的方面這樣的功能能夠使我們有效的規劃四輪車的行走路徑,以達到更好去控制四輪的目的,在無外部控制器或者是想要直接在模擬器的環境中直接模擬可以採用該方法達到比較好的效率。
本資料由40723240提供
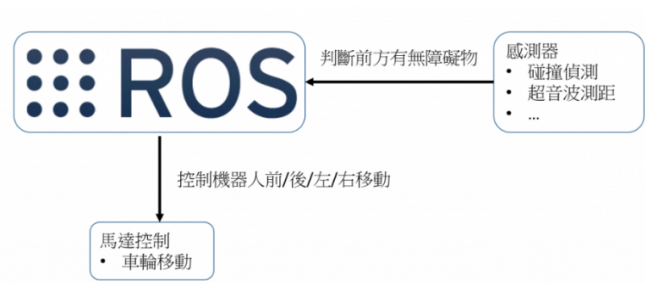
External controller tutorial:遠端控制器教程中,當我們想要從遠端電腦的方式控制我們在模擬中的物件例如:四輪車或機器人時我們就會需要一項遠程控制的控制器,我們可以參考ROS tutorial及ROS 2 tutorial來達到我們想做控制的想法,ROS主要比較像是對於機器人的中間控制系統,他能夠藉由傳感器來指引機器人該往哪個方向移動,如下圖所示,就是ROS較好的解釋。
ROS:比較像是在負責為機器人的各個元件進行溝通與操作的一個框架,以機器人的行走為例,要讓機器人走路需要控制其底下的馬達、還有一些感測器以進行避開障礙物的功能等等,ROS內就有這種類型的函式可以讓控制馬達的程式得以與接收感測器的程式溝通。
本資料由40723221提供
Simulation:這裡主要是在描述模擬是如何建立的,在模擬中我們雖然比較不會受到的限制很少,但是因為硬體的關係我們必須要適度調整好例如:模擬的速度快慢、非主要物件的加入或移除,我們也可以從這裡看到系統是如何調整速度運行的快慢和機制。
本資料由40723221提供
Simulation settings dialog:
這篇教程主要在幫助我們理解如何設定模擬時所需要設定的視窗要如何操控,並且講解當我們導入實際的時間運行時,模擬會產生怎樣的變化,但當我們使用加速或減慢時模擬的變化又會怎樣,在一般的情況下模擬的時間步長如果太快會造成模擬的結果及過程不精確甚至會有偵數漏掉的問題,如果太慢雖然會有較精確的結果和過程但會使得模擬時的總時長太久,在某些結構較符雜的模擬之下,模擬在運行到較為複雜的動作或者較難去運算的動作時會使得模擬的時間跟不上實際的時間,這時v-rep內建有寫入能夠補正此bug的方式,他可以藉由進行其他較為簡單的運動模擬時加速已達到與原先時長同步的效果。
四輪車初步馬達及本體和輪胎設置影片:
總結:完成四輪車的模擬必須要有對於模擬軟體的熟悉、馬達的設立、外部控制器的連結、模型的組立、結構的評估(過於複雜的結構可以經由省略內部某些部份零件或者是外觀零件的方式達到簡化)、內部攝像頭的設立、如何以程式(如:python)去所存於模擬中的物件並且對外部控制器做連結,若要進行只單單在模擬軟體中的模擬而不依靠外部控制器去控制作動,則必須要設定在內部模擬器中的感測器(如:距離感射器、視覺感測器等等……)並且布置如線條或者是障礙物的方式去使感測器運行,使物件達到想要的避讓或者是作動,而要達到這些都必須通過程式的設置來完成。
ast模組:https://docs.python.org/zh-cn/3/library/ast.html
Rendom模組:https://ithelp.ithome.com.tw/articles/10207483
Request:https://blog.gtwang.org/programming/python-requests-module-tutorial/
mde.tw中分組之程式:http://mde.tw/cd2020/content/Grouping.html
v-rep使用手冊: http://www.coppeliarobotics.com/helpFiles/index.html
v-rep車輛建模設置1:https://blog.csdn.net/abcvincent/article/details/104030418
v-rep車輛建模設置2:https://blog.csdn.net/abcvincent/article/details/104031159
V-REP車輛建模:https://zhuanlan.zhihu.com/p/105091011
Portable system <<
Previous Next >> assignment2